
Izračunavanje snage motora i odnosa reduktora 1
Prilikom izbora jednomernog motora potrebno je okvirno poznavati neke osobine pogonske mašine. U ovom tekstu kao primer pogonske mašine uzet je robot koji se pokreće sa dva pogosnska točka i osnanja se na jedan omdirekcioni točak, stoga potrebno je poznavati osobine kao što su masa robota, prečnik točka i dr. Naravno, uvek se ovaj problem može rešiti izborom motora koji je mnogo snažniji nego što je to zaista potrebno. Postoje dva razloga zašto je ovakav pristup pogrešan: prvi – snažniji motor je skuplji, drugi – zapremina robota mora biti unutar određenih dimenzija, a po pravilu, snažniji motor je većih dimenzija. Što su motori snažniji, zauzimaju veći prostor tako da ostali mehanički delovi moraju biti smanjeni. U većini slučajeva je to nemoguće. Zato je približan proračun neophodan postupak i često prvi korak kod projektovanja robota.
Nisu samo veličina i cena motora važni prilikom izbora. Važni faktori su i tačnost, preciznost i rezolucija. Poželjne osobine jednosmernih motora su: velik obrtni moment, mogućnost upravljanja brzinom obrtanja u širokom opsegu, dobra karakteristika brzina-obrtni moment, kao i široka mogućnost primene motora kao upravljačkog uređaja.

Brzina obrtanja jednosmernih motora u velikom broju slučajeva je prevelika. Osim toga, pri velikom broju obrtaja, izlazni moment je mali. Smanjivanjem napona brzina obrtanja se ne može drastično promeniti. Zato se koristi mehanički dodatak koji se montira na vratilo motora. Taj dodatak se naziva reduktor (sl. 1). Reduktor sistemom zupčanika smanjuje brzinu, a povećava moment na novom izlaznom vratilu. Naravno, na reduktoru postoje određeni gubici.
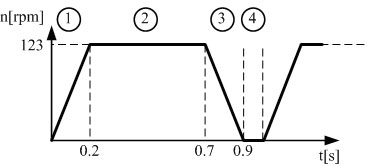
Pretpostavimo da robot radi u režimu predstavljenom na (sl. 2.). Sa slike se vidi da robot mora da ubrza do maksimalne brzine za jedan interval vremena, zatim se kreće tom brzinom određeno vreme i na kraju uspori. Radi što boljeg razumevanja problema dati su brojčani podaci i skica robota (sl. 3).

Slika 3. Usvojeni parametri robota
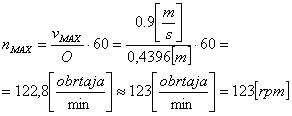
Prvo se iz maksimalne brzine i poluprečnika točka izračuna maksimalan broj obrtaja vratila na reduktoru (f 1).

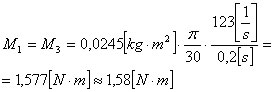
Moment potreban za ubrzavanje i kočenje je:

Moment inercije robota sveden na točak iznosi:
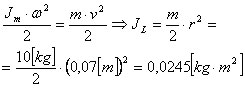
U formuli (f 3) uzima se polovina mase, jer se ona raspoređuje na dva točka. Sada se mogu izračunati momenti potrebni za ubrzanje i usporenje robota:
Tokom kretanja konstantnom brzinom motor razvija samo moment potreban za savlađivanje trenja:
gde je ? – koeficijent trenja kotrljanja između podloge i točka robota.
Ako pretpostavimo da je ? = 0,1 , tj. da je za pokretanje robota potrebna deset puta manja sila od njegove težine. Sada se može izračunati sila trenja
Moment koji razvija motor u različitim fazama iznosi:
| Faza ubrzavanja (trajanje 0,2 ?) | 2,28 Nm |
| Faza kretanja stalnom brzinom (trajanje 0,5 ?) | 0,7 Nm |
| Faza usporavanja (trajanje 0,2 ?,trenje pomaže kočenje) | 0,88 Nm |
| Faza mirovanja (trajanje 0,1 ?) | 0 Nm |
Maksimalni moment se javlja prilikom ubrzavanja. Moment koji određuje čitav ciklus iznosi:

Maksimalna mehanička snaga motora je:

U sledećem tekstu Izračunavanje potrebne snage motora i odnosa reduktora 2 dat je nastavak izračunavanja potrebnog reduktora motora i maksimalne rotorske struje motora.




Leave your response!
You must be logged in to post a comment.