
Izračunavanje snage motora i odnosa reduktora 2
Pri projektovanju sistema sa jednosmernim motorom potrebno je izvršiti proračun parametara motora. Pored proračuna snage i momenta potrebno je proračuanti i odnos reduktora i struju rotora motora. Reduktor je često neophodan jer je potrebno smanjiti brzina obrtanja vratila i povećati izlazni mehanički moment.
Pre nego sto počnete sa čitajnem ovog teksta ako niste obavezno pogledajte prethodni tekst pod nazivom Izračunavanje potrebne snage motora i odnosa reduktora 1. Nakon sto su u tekstu Izračunavanje potrebne snage motora i odnosa reduktora 1 izačunati potrebni momenti u odnosu na režime rada i maksimalna izlazna snaga motora potrebno je izvršiti odabir reduktora motora.
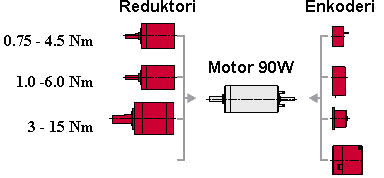
Slika 1. Različiti reduktori i enkoderi se mogu montirati na jedan motor
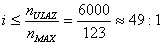
Ako se izabere motor od 90W (npr. zato što su jedino oni bili dostupni), postojaće dosta velika rezerva. Na osnovu MRMS i MMAX treba izabrati odgovarajući reduktor Slika 1. Različiti reduktori i enkoderi se mogu montirati na jedan motor. Reduktor se bira tako da pokrije opseg potrebnih momenata, pa je prvi reduktor na slici sl. 1 zadovoljavajući, jer pokriva opseg momenata od 0,75 – 4,5 Nm. Preporučuje se da na ulazu reduktora brzina obrtaja ne bude veća od 6000 rpm, na osnovu čega dobijamo redukcioni odnos:
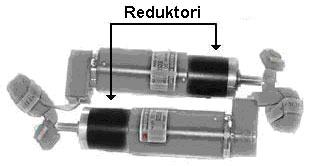
Biramo prvi manji odnos koji je fabrički dostupan (u ovom slučaju to je odnos 33:1). Efikasnost tog reduktora je 0,75, a maksimalni kontinualni moment na izlazu je 2,25 Nm (što odgovara jer je MRMS = 1,2 Nm < 2,28 Nm). Izgled reduktora MAXON RE35 motora dat je na slici 2. Izgled reduktora MAXON RE35 motora.
Brzina i moment na vratilu motora iznose:



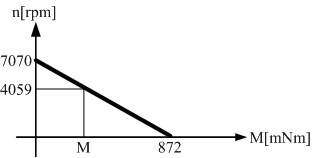
Upoređivanjem kataloških podataka i rezultata (f 2), vidi se da izabrani motor odgovara za datu upotrebu (maksimalni kontinualni moment je 77,7 mNm > 48,5 mNm). Mehanička karakteristika motora RE 35 90W je data na slici 3. Karaktristika motora na osnovu kataloških podataka.
Srednja vrednost gradijenta brzina-moment, takođe uzeta iz kataloga iznosi:
Potrebna brzina praznog hoda dobija se sa grafika na slici 3 i korišćenjem vrednosti (f 3):


Ako je na raspolaganju baterija od 12V i ako se uzmu u obzir padovi napona na pogonskom kolu, četkicama i raznim otpornostima, sa naponom od 10V se treba postići maksimalna brzina obrtanja (4837,2 rpm), što definiše maksimalnu brzinsku konstantu motora:

Kako je brzinska konstanta motora RE 35 90W KE = 491 rpm/V i kako je to veće od 483,72 rpm/V (f 5), jasno je da odabrani motor odgovara i da postoji rezerva s obzirom na regulaciju brzine (i sa nižim naponom će se postići potrebna brzina).
Maksimalna struja motora koja se javlja iznosi:
Ovaj podatak je važan prilikom projektovanja pogonskog kola koje bi u ovom slučaju trebalo da izdrži 5 A bez većih problema.
Na kraju treba navesti da se osim ovde pokazanog direktnog postupka izbora može koristiti i inverzni postupak. U inverznom postupku se polazeći od poznatih kataloških podataka za motor, željene struje pogonskog kola (f 6) i napona napajanja izračunavaju maksimalna brzina, masa i poluprečnik točka robota.




Leave your response!
You must be logged in to post a comment.