
Merenje i kontrola struje motora šant otpornikom
U ovom tekstu opisan je jedan od načina merenja struje jednosmernog motora. Od opisanih načina merenja struje u tekstu Načini merenja struje motora, jasno je da merni šant predstavlja optimalan izbor kad su u pitanju robotske aplikacije. Dakle, između sorseva donjih mosfetova i mase treba dodati šant-otpornik slika 1.
Koji šant otpornik treba izabrati? Prilikom rada H-mosta, na šant-otporniku nije poželjno da postoji značajniji napon, jer se tako smanjuje efikasnost uređaja. Na primer, za bateriju od 12 V usvaja se maksimalna vrednost napona od 1 V. U slučaju kada je napon na šantu 1 V, maksimalni napon na motoru je 11 V. Jasno je da se povećanjem napona na šantu smanjuje napon na motoru.
Struja motora je talasnog oblika. Maksimalne vrednosti mogu biti dosta velike. Pri nominalnom optrećenju motora MAXON RE 35, 90W, struja je oko 4 A. Međutim, vršne vrednosti struje prelaze 15 A pri frekvenciji PWM-a od 1 kHz. Ako je potrebno detektovati maksimalnu struju od 10 A i da pri tome zahtevani pad napona na šantu iznosi okvirno 1 V, onda otpornost šanta treba biti 0,1 Ω. Sada se može izračunati potrebna snaga šanta. U ovom slučaju se dobija da je potrebna snaga šanta 10 W. Otpornici za ovu snagu su najčešće keramički i velikih su dimenzija. Naravno ukoliko je vrednost maksimalne struje koja se želi meriti veća zahtevi za snažnim otpornikom se takođe smanjuju.
Sada će biti objašnjen jedan način kontrole struje, koji se može donekle uopštiti ako se uzme u obzir da druga principska rešenja približno isto obrađuju ovu problematiku. Razmatra se kolo na slici 1. Za vreme pozitivne vrednosti PWM-a, struja motora teče kroz tranzistore T1 i T4, i naravno kroz šant-otpornik RS slika 1.
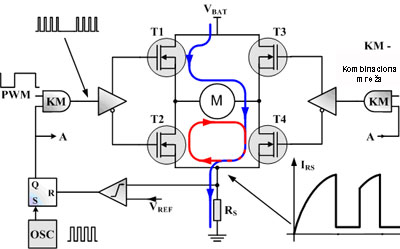
Slika 1. Merenje struje opterećenja u H-mostu
Struja stvara pad napona na šantu koji se komparatorom upoređuje sa referentnim naponom slika 1. Dakle, kada struja kroz šant-otpornik, odnosno napon na njemu, dostigne tačno podešenu vrednost, na izlazu komparatora se dobija informacija koja se dalje obrađuje drugim digitalnim kolima. Posebno je važna činjenica da je referentni napon podešljiv, iz čega proističe da je granica na kojoj radi strujna zaštita takođe podešljiva.
Na slici je prikazana kontrola struje pomoću leč kola, koja se u praksi najviše koristi. Oscilator na početku svake periode setuje leč tj. izlaz Q postaje aktivan. Kada se dostigne referentni napon, odnosno kada struja poraste do granice određene tim referentnim naponom, komparator resetuje leč. Ovako se dobija PWM sa periodom jednakoj periodi oscilatora. Srednja struja motora se može kontrolisati referentnim naponom na komparatoru. Ovo je naročito bitno ako je potreban konstantan moment na izlazu elektromašine. Menjanjem referentnog napona stvara se PWM koji obezbeđuje da talasnost struje bude u okviru zadatih granica slika 2.
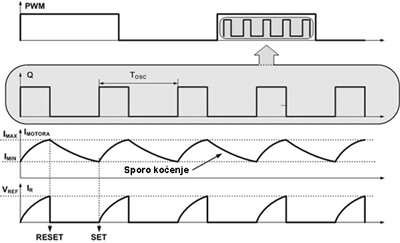
Slika 2. Kontrola struje preko S-R leča i oscilatora
Na gornjem grafiku slika 2 je prikazan PWM koji je rezultat, na primer, P regulatora brzine obrtanja motora. Kao što se primećuje, njegova perioda je znatno veća od periode oscilatora.
Ako je izlaz P regulatora brzine označen kao PWM, zašto se izlaz sa komparatora ne upoređuje sa ovim PWM-om nego sa signalom sa oscilatora? Induktivnost i otpornost motora određuju njegovu vremensku konstantu, odnosno brzinu promene struje. Preko vremenske konstante procenjuje se vrednost frekvencije PWM-a koja obezbeđuje rad motora u kontinualnom režimu. Kontinualni režim rada motora je poželjan jer obezbeđuje male oscilacije momenta, što je veoma važno u pojedinim primenama. U diskontinualnom režimu, struja motora u pojedinim trenucima jednaka je nuli, što znači da je i moment tada jednak nuli. Velike oscilacije momenta nisu dobre za motor, kao i za pogonsku elektroniku.
Kako izbeći diskontinualni režim rada motora? Za svaki motor, na osnovu njegovih kataloških podataka, izračunava se vremenska konstanta, koja opisuje način promene struje rotora. Vrednost vremenske konstante je jednaka količniku induktivnosti i otpornosti motora. Ukoliko je vremenska konstanta manja, znači da je promena struje veća. Da bi motor radio u kontinualnom režimu, za određeni faktor ispune, mora biti ispunjena sledeća nejednakost (f 1):

gde je α faktor ispune PWM-a, tONX definiše granicu između kontinualnog i diskuntinualnog režima, a m i σ se izračunavaju po formulama:


gde je E – elektromotorna sila, VBAT – napon napajanja, T – perioda PWM-a i τ – vremenska konstanta motora.
Kao primer može se izračunati frekvencija PWM-a za motor RE 35 90W. Otpornost namotaja je 0,334 Ω, a induktivnost 90 μH, što znači da je vremenska konstanta veoma mala. Ako se već pri faktoru ispune od 40% želi ostvariti kontinualni režim, dobija se da frekvencija PWM-a treba da bude dosta velika, tj. znatno veća od korišćene frekvencije (1kHz) kojom je drajver opisan u prethodnom poglavlju pogonio motor na takmičenju Eurobot. Sada je jasno zašto se koristi oscilator i zašto je neophodno da „pravi“ PWM ima frekvenciju jednaku osilatoru. Dakle, sa izlaza mikrokontrolera (u kome je napravljen R regulator) se na drajversko kolo dovodi „spori“ slika 2. PWM koji se praktično moduliše frekvencijom oscilatora.
Šema na slici 2. ima ugrađenu kontrolu struje. Podešavanjem referentnog napona podešava se granica do koje struja može da raste slika 3. Komparator, S-R leč i oscilator predstavljaju unutrašnju povratnu spregu po struji, jer utiču na upravljačku promenljivu, odnosno PWM slika 3. Jasno se vidi da se menjanjem referentnog napona menja srednja vrednost struje kao i PWM.
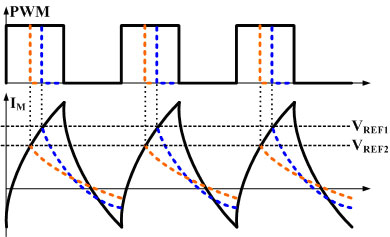
Slika 3. Uticaj promene referentnog napona na oblik struje
Od motora se u nekim primenama očekuje da tokom čitavog svog radnog veka daje konstantan moment. U ovom slučaju se izračunava potreban referentni napon komparatora koji daje takav moment koji se više ne menja tokom rada. Naravno, dobro je ako postoji mogućnost podešavanja (na primer trimerom ili potenciometrom) radi kompezovanja grešaka usled različitih spoljašnjih uticaja (na primer starosti komponenata). Ukoliko se od motora očekuje da daje više različitih „konstantnih“ momenata, onda se referentni napon mora menjati. Promenom referentnog napona najčešće upravlja nadređeni mikrokontroler, bilo preko D/A konvertora bilo preko digitalnih potenciometara.
Ako se zahteva precizna brzina obrtanja motora, onda je kontrola struje suvišna pa je dovoljno generisanje PWM-a odgovarajućim PI regulatorom. Ovakav slučaj se javlja u robotici. Međutim, kontrola struje se u ovom slučaju koristi za zaštitu mosfetova u H-mostu. Odredi se referentni napon komparatora koji odgovara maksimalnoj dozvoljenoj struji kroz mosfetove. Kada se dostigne referentni napon, izlazni signal sa komparatora ukida PWM tako da struja počinje da opada slika 3. Ovako se ne koristi sva dostupna snaga motora, ali je zato drajversko kolo zaštićeno.
Izvor:
Živorad Mihajlović,
Evgenije Adžić,
Mirko Raković
Elaborat tima BREBRE za robotsko takmičenje Eurobot 2004 god.




Leave your response!
You must be logged in to post a comment.