
Sporo (dinamičko) kočenje jednosmernog motora realizovano H – mostom
Postoje dve vrste kočenja: sporo (dinamičko) i brzo (rekuperativno) kočenje. Kod sporog kočenja krajevi motora se dovesti na isti potencijal kratkim spajanjem krajeva.
U sledećem primeru je opisano kako se izvodi sporo ili dinamičko kočenje u H-mostu. Kada provode tranzistori T1 i T4 slika Pogon motora stujom od VoA ka VoB tj. kada je PWM na logički visokom nivou, struja raste saglasno vremenskoj konstanti motora. Po nailasku neaktivnog dela PWM-a, motor prelazi u režim kočenja.
Isti efekat kočenja dobija se spajanjem krajeva u gornjoj ili donjoj konturi H-mosta. U ovom modula za pogon robota logika kola obezbeđuje da se prilikom nailaska neaktivnog dela PWM-a isključi mosfet T4 vidi sliku Sporo kočenje motora nakon pogona od VoA ka VoB. Pošto su signali za uključenje jedne strane mosta invertovani jedan u odnosu na drugi, sledi da će tranzistor T3 uključiti. Ovo nema nekog suštinskog značaja zbog toga što induktivnost motora neće dopustiti da se smer struje promeni. Struja motora ne menja smer, a pošto se mosfet T4 koči, strujni krug se zatvara preko diode D3 i tranzistora T1.
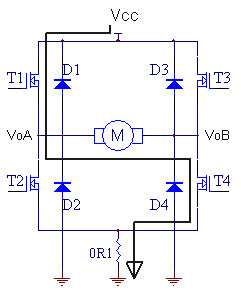
Pogon motora stujom od VoA ka VoB
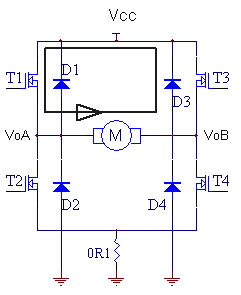
Sporo kočenje motora nakon pogona od VoA ka VoB
Kod testiranog modula za pogona robota sporo kočenje se izvoditi u gornjoj konturi. Ovaj način kočenja nije izvodljiv u ovoj realizaciji modula za pogon jer se prilikom sporog kočenja isprazni butstrep kondenzator. Drajver nije u mogućnosti da zakoči motor jer tranzistor T1 prestaje da provodi jer gubi napajanje potrebno za ukljulenje T1 (napaja se iz butstrep kondenzatora). Da bi se omogućilo sporo kočenje modula za pogon robota potreban je ispravan rad tranzistora T1 koji se postiže bipolarnim upravljanjem H – mosta.
Kočenje je izvodljivo i u donjoj konturi, čak je i obavezno ukoliko je važna informacija o veličini struje kočenja. Uključivanjem donjih tranzistora struja kočenja prolazi kroz D2, T4 i otpornik RS, koji mora biti u stanju da podnese disipaciju i usled kočenja, što je u prvom slučaju isključeno.
U ovom slučaju H-most je projektovan da radi u sva četiri kvadranta Ud, Id ravni. To znači da je omogućen protok energije u oba smera. Motor može raditi u motorskom režimu u oba smera ili u režimu rekuperativnog kočenja. Ovo u stvarnosti znači da je moguće na motoru promeniti polaritet napona i smer struje.




Leave your response!
You must be logged in to post a comment.