
Digitalni inkrementalni enkoder
U specijalizovanu vrstu senzora za merenje brzine, pozicije i smera obrtanja vratila motora spadaju digitalni inkrementalni enkoderi, DC tahometri i rezolveri. Princip rada enkodera može biti zasnovan na magnetno-otpornom principu, na magnetnom principu sa Holovim senzorom i na optičkom principu. Najrasprostranjeniji su enkoderi zasnovani na optičkom principu.
Vrste Digitalnih inkrementalnih enkodera
U narednom tekstu opisane su vrste i podela načina merenja brzine i položaja vratila motora. Postoji više vrsta senzora za dobijanje informacija o brzini i položaju motora. To su:
- digitalni inkrementalni enkoderi,
- DC tahometri i
- rezolveri.
U ovom tekstu je opisano korišćenje digitalnog inkrementalnog enkodera kao senzora brzine kojim se motor obrće.
Digitalni inkrementalni enkoderi se prave u nekoliko varijanti. To su enkoderi zasnovani na:
- magnetno-otpornom principu (MO enkoderi),
- na magnetnom principu sa Holovim senzorom i na
- optičkom principu.
Poslednje navedena vrsta senzora je povoljna za zadatke pozicioniranja vratila motora. Takođe je moguće određivanje smera rotacije i brzine vratila motora. Oni su ujedno i nejčešće korišćena vrsta senzora.
Enkoder zasnovan na magnetno-otpornom principu (MO enkoder)
Kod MO enkodera višepolni magnetni disk je spojen na vratilo motora. Kada motor radi, proizvodi se sinusni napon na MO senzoru. Prednosti ovog tipa enkodera su:
- mali prostor koji zauzima enkoder,
- veliki broj impulsa,
- mogu biti selektovani različiti brojevi impulsa,
- može biti selektovan indeks kanal (detekcija punog kruga motora) i
- moguće je linijsko upravljanje.
Enkoder sa Holovim senzorom
Enkoder sa Holovim senzorom (Slika 1. Prikaz enkodera zasnovanog na magnetnom principu sa Holovim senzorom) je sličan prethodno opisanom MO enkoderu. Razlika je u tome što se različiti polovi na višepolnom magnetu detektuju Holovim senzorom i šalju na elektroniku kao kanali A i B. Osobine ovog enkodera su:
- zauzimaju malo prostora,
- imaju dva kanala A i B,
- nije moguće linijsko upravljanje i
- mali broj impulsa.
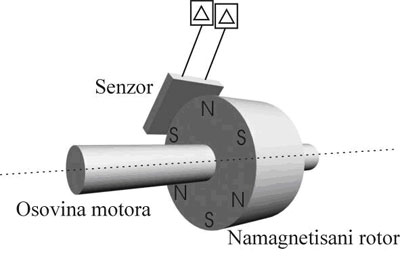
Slika 1. Prikaz enkodera zasnovanog na magnetnom principu sa Holovim senzorom
Enkoderi zasnovani na optičkom principu
Enkoderi zasnovani na optici (Slika 2. Princip rada enkodera zasnovanog na optičkim signalima) šalju svetlost sa LED diode kroz fino izrezan točak kruto vezan na vratilo motora. Prijemnici (fototranzistori) pretvaraju svetlo/tamni signal u odgovarajući električni impuls koji se pojačava i šalje na obradu. Osobine ovog enkodera su:
- zauzimaju veliki prostor sa izbočinama,
- veliki broj impulsa na izlazu,
- mogućnost indeks kanala i
- moguće je linijsko upravljanje.
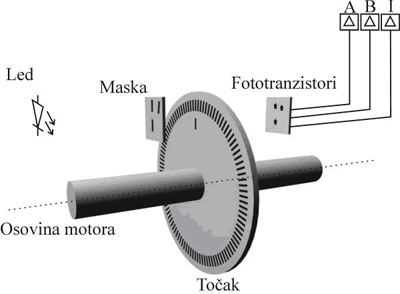
Slika 2. Princip rada enkodera zasnovanog na optičkim signalima
Enkoderi proizvode jednostavne pravougaone impulse koji se koriste kao informacija pri upravljanju motorima. Ti impulsi se mogu brojati radi proračuna pozicije ili određivanja brzine. Kanali A i B su fazno pomereni, pa se njihovim upoređivanjem može ustanoviti smer obrtanja rotora. Početni impuls (indeks kanal I) se koristi kao referenca pri određivanju ugla rotora. Oblik signala na izlazu iz enkodera je prikazan na slici 3.

Slika 3. Oblici signala na izlazu digitalnog inkrementalnog enkodera
Izgled digitalnog inkrementalnog enkodera HEDL 5540 je dat na slici 4.

Slika 4. Izgled enkodera HEDL 5540
Izvor:
Evgenije Adžić, Mirko Raković, Živorad Mihajlović
Elaborat tima BREBRE za robotsko takmicenje Eurobot 2004 god.




Leave your response!
You must be logged in to post a comment.